UAV Antenna Positioning System

A closed loop feedback, PID tuned, beyond line of visual sight, dual radio frequency, antenna position system for fixed-wing and multi-rotor UAVs.
UAV Antenna Tracker: Design and Implementation
Tracking Mechanism
Trackers orient antennas using UAV telemetry (GPS, velocity). Pointing angles for tracker position ($T_{\text{lat}}$, $T_{\text{lon}}$, $T_{\text{alt}}$) and UAV position ($U_{\text{lat}}$, $U_{\text{lon}}$, $U_{\text{alt}}$) are computed: [ \theta = \atan2(\sin(\Delta_{\text{lon}}) \cos(U_{\text{lat}}), \cos(T_{\text{lat}}) \sin(U_{\text{lat}}) - \sin(T_{\text{lat}}) \cos(U_{\text{lat}}) \cos(\Delta_{\text{lon}})) ] [ \phi = \atan2(\Delta_{\text{alt}}, d), \quad d = R \cos^{-1}(\sin(T_{\text{lat}}) \sin(U_{\text{lat}}) + \cos(T_{\text{lat}}) \cos(U_{\text{lat}}) \cos(\Delta_{\text{lon}})) ] where $\Delta_{\text{lon}} = U_{\text{lon}} - T_{\text{lon}}$, $\Delta_{\text{lat}} = U_{\text{lat}} - T_{\text{lat}}$, $d$ is ground distance, $R$ is Earth radius.
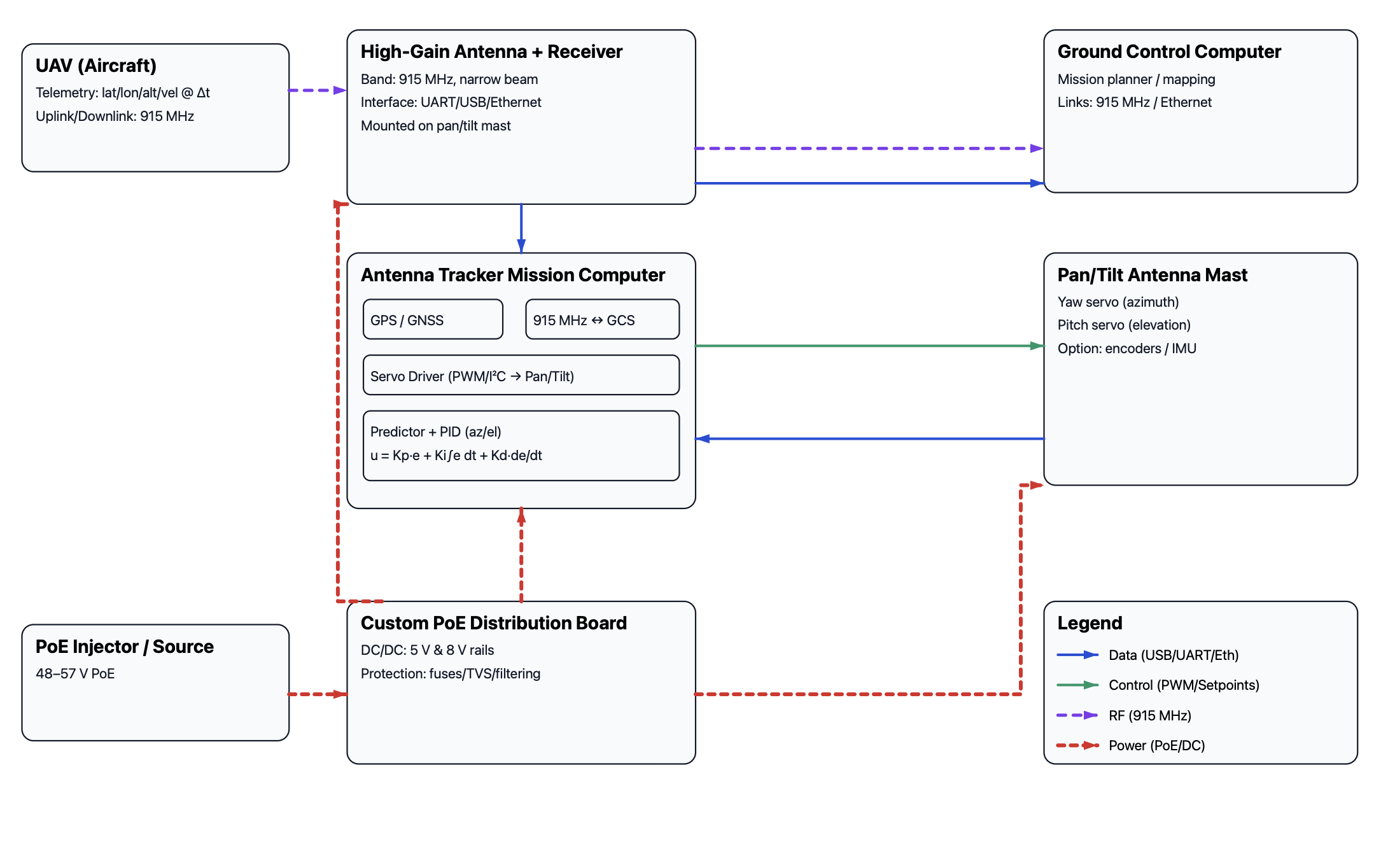
System Components
- Receiver: 915 MHz radio captures UAV telemetry via 14 dBi Yagi antenna.
- Mission Computer: Raspberry Pi processes telemetry, computes angles, outputs PWM; includes u-blox NEO-M8N GPS (<2.5m data-preserve-html-node="true" CEP).
- Servos: High-torque units control yaw (360°) and pitch (0-90°); <1° data-preserve-html-node="true" accuracy at 10 Hz.
- PoE Board: Custom board with LM2596 (5V/3A, computer/radios) and XL4015 (8V/5A, servos); 48V input, >85% efficiency, 5A fuses.
PID Control
Predictive PID mitigates telemetry (50-200 ms) and servo (20-50 ms) latencies. Position prediction: [ \mathbf{p}{\text{pred}} = \mathbf{p}{\text{curr}} + \mathbf{v} \cdot (\tau_{\text{lat}} + \tau_{\text{hor}}) ] Output: [ u = K_p e + K_i \int e , dt + K_d \frac{de}{dt} ] where $e$ is angular error. Gains ($K_p = 1.5$, $K_i = 0.2$, $K_d = 0.5$) tuned via Ziegler-Nichols; Kalman filter fuses GPS/IMU.
Power System
PoE board distributes power: [ V_{\text{out}} = \begin{cases} 5 , \text{V}, , 3 , \text{A} & \text{(computer, radios)} \ 8 , \text{V}, , 5 , \text{A} & \text{(servos)} \end{cases} ] Efficiency >85% at 20W, with fuses and EMI filtering.
Firmware Design
Custom ArduTracker firmware, ported to ARM, integrates PID prediction, PoE monitoring, ArduCopter telemetry. Lua extensions adjust gains dynamically. RTOS ensures real-time execution; SD card logs diagnostics.
Operational Capabilities
- Range: SNR >20 dB at >10 km with high-gain antenna.
- Failsafes: Holds position on signal loss; waypoint return.
- Deployment: PoE enables rapid setup for continuous BVLOS missions.